 赞
赞 2019年春节放假期间发布的无人机事故案例共有15起,不可谓不热闹。这不还有两天,短暂的春节长假就结束了,站长在这里也给大家拜个晚年~ 祝大家晚年幸福。

大部分事故可以通过阅读说明书、更多的了解无人机原理和特性避免,其他一部分可以上看炸机LOOK别人怎么炸,然而隐藏在无人机平常无奇背后的暗坑~则就又到了站长的经验说教时间。
电池
作为消费级航拍无人机上第二贵重的物件(第一贵重当然非云台相机莫属),又贵又娇气~存放一定时间后容量失准或意外断电,导致无人机迫降和坠落。而且不注意定期补电,饿死电池的也大有人在。
同时因为电芯品质的差异,不少电池远未达理论寿命既发生不平衡而报废。

而电池鼓包的也并不少见

仅半年的有限质保期,等你想起联系厂家,客服小姐姐会字正腔圆轻声细语彬彬有礼的告知:“建议您重新购买”~

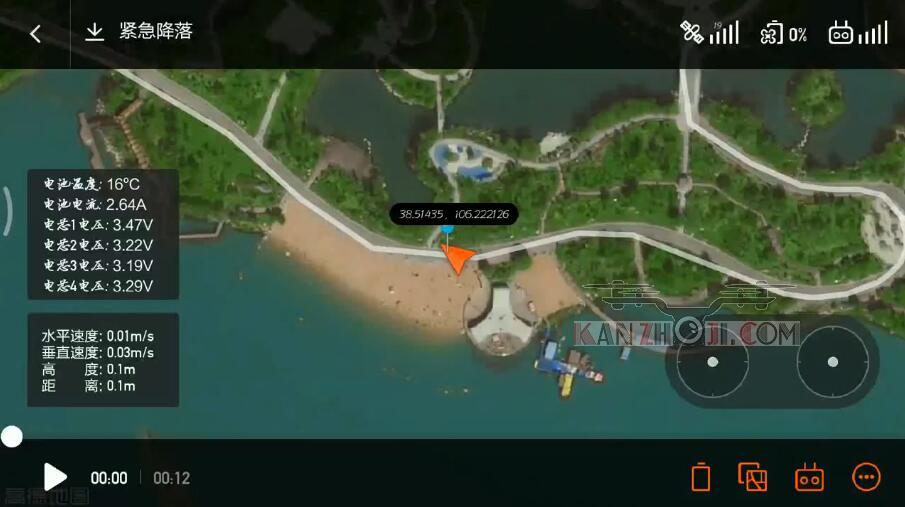
而且大部分新手根本不打开电压显示,仅根据电池容量飞行,无法提前预见可能发生的低压迫降。

多循环数内阻大增的电池,可能一起飞电芯电压就会掉到3.8V附近,已经不适宜飞行。
并且,目前未有任何厂家针对开机检测电压和解锁起飞电压,落差过大提供额外告警,因为飞炸了你自己的事儿 

高度
无人机显示的高度主要来自气压计,而且是相对起飞点的相对气压高度,并非物理真高(这一点几乎所有无人机厂家都未在说明书中提及)。带到100米高的楼顶起飞,起飞也是显示0米。
同时因为气压传感器误差和相对起飞点的气压高度落差,不能想当然靠设置101米的返航高度飞越物理真高100米高的塔,120米是个起码的冗余量(一些建筑顶部的广告牌和基站天线就得用掉几米)。

见过不少新手在撞击事故发生后,拿建筑物理真高跟厂家撕得面红耳赤。

无人机爬升高度避开障碍的同时,风力干扰无人机运转的风险也在同步增加,最坏的情况是大逆风根本飞不回去。飞得高还会导致具备智能电量计算的飞控,更早的触发返航或迫降。
而为了更好的在低空工作(气压计在2米真高内精度较差),大部分无人机还具备精度更高的下超声波和红外传感器,气压数据低于一定值,无人机飞行控制器就采信低空传感器的定高数据。提高低空飞行定高品质的同时,又带来了另外的问题。
下超声波或红外机型
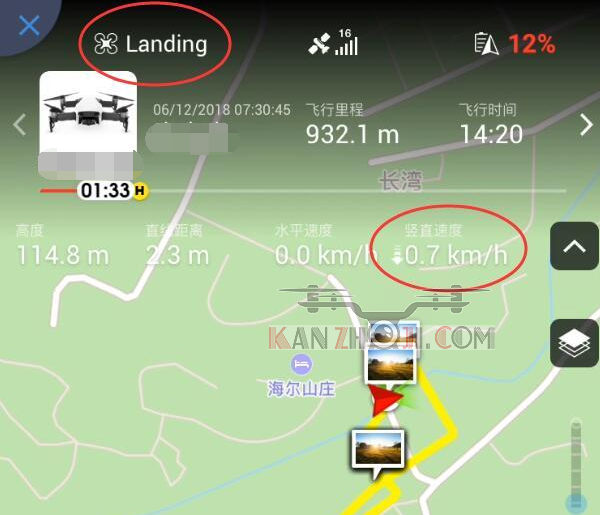
由于流体特性干扰低空定高传感器工作,无人机在水面若是低于10米,大概率会发生掉高或自动降落,下拉油门达到一定量也会降落。所以嘛,反应不快的老司机,还是飞高点啦。

两枚喜闻乐见的水面意外降落:
下红外机型
红外传感器被云雾干扰后使无人机误判,导致无法下降或下降速率极慢,最终导致耗尽电量坠机。

因此,穿云穿雾的同志,关闭下视再浪也不迟。 
那不能手动关闭的机型怎么办?当然是尽快飞离干扰区域,不然就得重新下单了…
 (无人机销售员此刻的心情)
(无人机销售员此刻的心情)
视觉避障
因避障摄像头为固定角度,覆盖广度有限且分辨率不高,同时对飞行模式、体积、光线、对比度、飞行速度有要求,仅能覆盖一部分场景。所以树枝、电线啥的就别想了,而且~仅在特定模式下,所有避障摄像头才同时工作。

经常航拍作业的同志还发现,在近景航拍中避障还极易误动作,不能开启,否则镜头报废。 
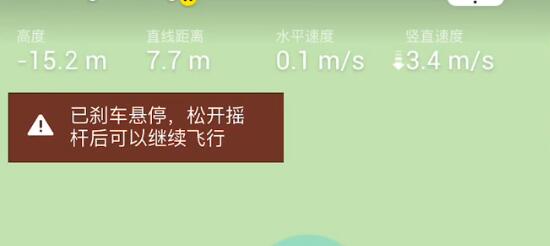
如返航途中遇大逆光场景导致视觉避障误判(对着太阳飞),还有一定概率会造成返航停止,无人机不断爬升至高度上限。Mavic Pro刚上市那会儿站长在试飞过程中就遇到了,因为还在目视距离内,一路退回来了,没有走APP菜单去关掉避障。不过这个问题随着固件的修正,已经很少见啦,更常遇到的是空中突然刹车。
超声波避障
超声波反射覆盖角度小,同时因为作用距离更加有限,更低飞行速度留出缓冲空间才能有效刹车。

视觉跟随
对目标稳定性、面积、对比度、移动速度要求高,丢失目标是家常便饭。丢失目标后无人机随机漂移炸机的比比皆是,目标丢失后仅有极少数机型还能依靠避障幸存。

另外一种情况是,开跟随没注意刷新返航点,最后飞机快没电了,飞机自动返航到一开始起飞的地方,大写的尴尬,先到先得~~ 
图传
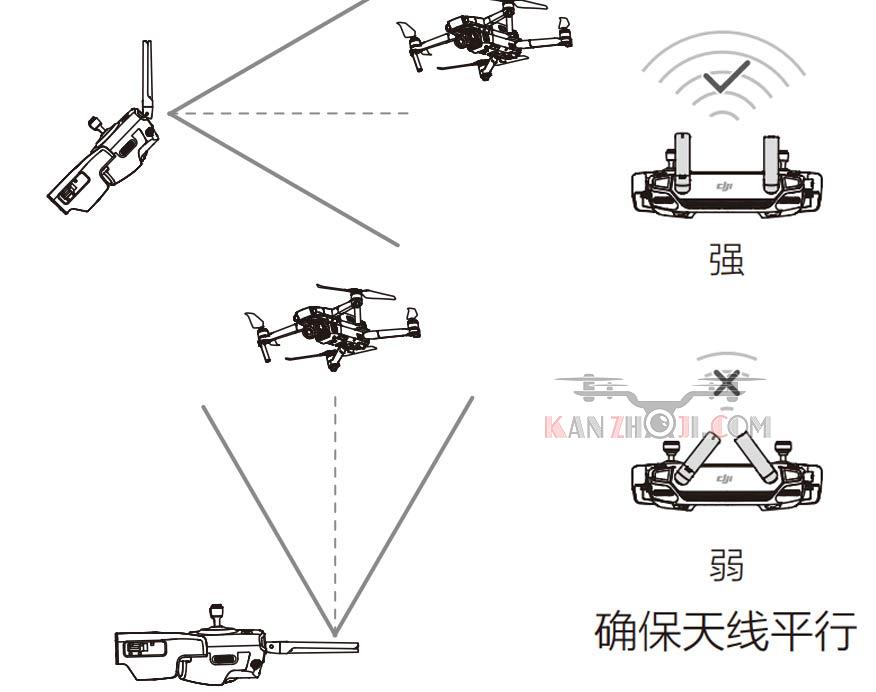
受无线电频率使用情况、环境开阔度、天线指向、无人机位置、飞行地理条件、天气影响,图传实际距离可以在30米~17公里范围伸缩~

视距内正确的天线摆放示意图(来源:DJI Mavic2 Zoom Quick Start Guide),超视距后还需配合无人机位置和指南针确定天线朝向。
一键返航
各厂家默认返航高度一般都只有几十米,在高楼林立的城市里飞行~ 低空超视距触发失控,嗯…基本就等于凉凉了。当然,新手最容易犯的还是未等待卫星定位,刷新返航点就开飞,最后飞机返航到哪儿,取决于浪出去多远飞机才完成卫星定位。
那具备原路径返航功能的机型呢?会好点~~ 不过前提也是环境和光线可以满足VIO建模,否则~ 一样是直线返航。另一个隐藏得极深的小坑是,如果返航点距离大于2KM,一样是直线返航(到目前为止精灵4PRO,2.0,御2都是这个返航逻辑)。

已上市机型中仅有大疆Mavic pro及后续机型,和飞米 X8 SE提供APP大风告警功能,其他厂家则通通欠奉。
同时一键返航功能在大逆风场景下,会给你帮倒忙~~ 手动接管无人机切换到运动模式,且迅速降低至不丢失图传的高度全速返航更为安全。

电子围栏
电子围栏坑又分两种情况:
1、不等卫星定位就姿态模式起飞,飞远后发现自己处于禁飞区中,飞机迫降无法返航。这也是为何新手一定不要着急起飞,第一等待卫星定位完成,无人机记录完返航点,第二判定是否在禁飞区的原因。
2、电子围栏边缘触网,如无人机未能尽快下降至120米,摇杆将不响应返航方向(电子围栏内)的打杆操作,直至耗尽电量坠机,老司机也得翻车。

卫星干扰
最常见的情况卫星信号干扰就是高层建筑和无人机上方障碍物的遮挡了,新手在建筑物旁边起飞会引起返航点记录偏差,下图这种返航点记录直接定位到了楼里,一键返航就是一键撞楼。

离建筑物太近还容易使卫星数和信号质量变差,最终无人机在无征兆的情况下产生位置飘逸。并且同时,卫星数和质量又还有一部分,无人机并不会直接进入姿态模式。

另一种情况相对罕见,但是只要遇上翻车率极高。某些大功率视频监控和无线电设施,干扰民用GPS频率段造成区域无星。
目前GPS卫星模块用到L1波段-1.57542GHz、L2波段-1.22760GHz、L3波段-1.38105GHz、L4波段-1.84140GHz。
很不凑巧,市面上大量廉价的无线视频监控图传也在该频段附近,按频点来说从1~1.6Ghz不等,同时还有功率大的特点。大厂的产品还好说,频率射散范围并不大,对空中的无人机基本没有影响。
好比马路上的车辆开着近光灯~ 并不干扰他人。而山寨货嘛~~~管你什么无人机飞到该区域都能抓瞎。尽快爬升高度或飞离该区域才是上策。

但如果运气再差点,该区域不仅卫星频段干扰,2.4G和5.8G频率同样污染严重(同无人机干扰枪的效果),卫星+无线电连接双丢,无人机随机飘逸至撞击或自动降落。

因此,在城市中飞行风险甚高,发生事故还容易产生连带责任,并不是什么好选择。
最后敬告各位无人机飞手,为了看炸机的投稿不断,炸机事业的蒸蒸日上,不要看说明书~不要看说明书~不要看说明书~ 重要的事说三遍。

OsitaLV、Tom Liuis对本文亦有贡献。
