 赞
赞 在消费级多旋翼无人机已被大众认知并熟悉的今天,无需刻意寻找,都可偶遇正在放飞的无人机。
而无人机航拍带来的全新视角、超视距飞行、具有自主返航的飞行能力,也是绝大部分消费者乐于购入无人机的初衷。
当消费级无人机新品,被一家叫大疆创新的无人机公司频频刷新,黑科技的力量总是让人叹服。
然而不管是首次具备视觉避障功能的精灵4,还是刚刚发布带有增强避障的悟2、精灵4 PRO,消费级无人机目前都难以在能接受的成本下,精确取值无人机的绝对高度问题。
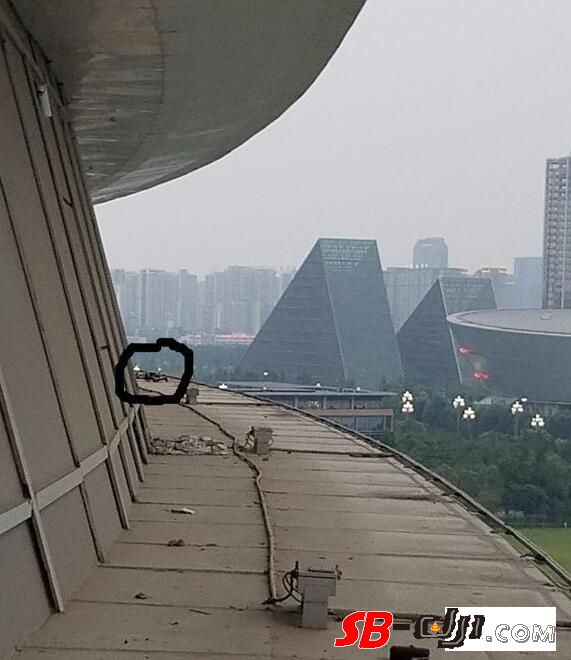
而因误解无人机高度引发的安全事故,往往损失惨重,甚至无法挽回。在KANZHAJI上已有很多生动的无人机落水、坠海、撞楼案例,那么….怪卫星?怪气压计?还是怪超声波?还是仅仅因为 “我”的高度,你不懂。

(图片由伊犁-安安提供)
1、人家不是你想的那种高度
近些年随着消费级无人机安全事故频发,各大厂家都限制了自家无人机的最大飞行高度,限制从120米到500米不等。

以往不限高度的飞行,一去不返。
而不管是航模玩家还是彻底的新手初入手无人机,最易线性思维造成的误解,还是对无人机高度的初始定义。
不少人想当然的认为,当前海拔既是无人机高度,如果手里的无人机限飞高度为120,要是飞机拿到山顶岂不是无法起飞?
然而这纯属多虑,消费级无人机定义的零高度,是取决于通电并初始化完毕(或起飞)时,以当前海拔气压作为初始零高度。
因此不管你是深入谷底还是攀爬高峰上起飞,无人机都以初始零高度基础上的气压变化,才表现为高度增减。当无人机低于初始零高度时,显示高度为负数。
而厂家广泛采用的软件逻辑,更多还是取启动电机时的气压值,作为初始零高度。就像战斗机飞行表演,为追求更精确的高度提供给飞行控制器,飞行员不会在机库重置高度,而是在跑道上重置,因为机库与跑道之间同样存在高度落差,虽然已经很小。
以上算是消费级无人机高度定义的一般概念。
基于以上概念,大家可以知道,飞机传回的高度,只是基于气压初始零高度+基于初始零高度增减变化而已。
下面我们举例新手最爱跟厂家撕逼的一个事故场景:
艾炸鸡同志的无人机在城区起飞了,设定的返航高度是50米,飞机飞行到1800米外失控触发返航,却意外撞楼,艾炸鸡事后得知该楼只有45米高,凭什么撞了!!!肯定是奸商的烂产品作怪!

返航高度设定不足的炸鸡场景:
回到我们之前的高度定义,飞机的高度标准仅仅取决于解锁场地的初始零高度增减量,并非飞机实时位置的对地真实高度。
(当然,消费级无人机的气压计也是有误差滴,下一章节会提到。在这个例子里,我们暂且略过)
除非艾炸鸡同志解锁无人机的绝对海拔与大楼地基海拔完全一致,否则必然存在气压高度落差,可能大,也能小~~ 于是返航高度设定为50米的无人机,撞上只有45米的楼(楼顶还有基站天线等附属设置,也会增加一定高度)就发生了。
要怎么避免呢?返航设定高于飞行半径内最高建筑物的估算高度,再加上30~50米的富裕量呗。。。 
山区飞行,需留出更多高度富裕量,否则~~
那排除气压落差,是不是以气压高度作为绝对高度就靠谱了呢?然而也并不是….
2、气压计精度有使用条件,也有误差

消费级无人机因为制造成本、体积、负载能力的原因,不可能采用工业高精度气压计,而是采用大批量可廉价生产的气压计器件。
此类气压计在超低高度(低于3米)误差偏大,而随着高度升高,气压计精度逐步上升,大于5米后可以做到+-30厘米的精度,再辅以飞控内的加速度计做数据融合,大部分场景可以把高度漂移锁定在+-20厘米范围内。
因此,贴地、贴水面飞行时,无人机处于气压计低精度状态,较容易发生高度误差。如飞行速度较快,气流高速冲击气压计,还可进一步使无人机高度控制力变差。
因此奉劝各位,低空飞行必须全神贯注,并保持敏锐的洞察力,时刻需要控制油门介入。以上技能也是新手所不具备的,新手练习时与其低空上窜下跳的蹦达(低空也存在乱流和地效),还不如飞高一点,5~10米练习飞行,并避开水面,无人机会有更稳定的定高表现。
当然,只要使用气压计作为唯一的限高指标,就有破限高的办法,比如~~ 我先买个密封箱,把飞机丢进去抽点气,再解锁,然后~~ 就可以为所欲为。好了,不能说再多了。 
厂家是不是对减压法破解限高就没办法呢?当然也不是~ 通过限制最大负气压高度(用抽气法也最多再多飞300米高度),或对比GPS海拔,一样可以判断用户是否在气压上存在作弊。
3、气压计、卫星、超声波都可提供高度
气压计是大家最直接会想到的高度参考源,的确,通过检测气压,传感器可以提供高精度、高刷新率的稳定输出,且较少受天气影响。
然而卫星依旧可以提供高度数据,且量程远超气压计。虽然误差相对气压计大得多,刷新频率也不够,还依赖外部天气和高度对卫星信号的影响。然而早期的固定翼飞控,因为飞行较高2000~4000米,天然对高度不敏感,取用卫星提供的高度飞行,即使存在十几米的误差,也不会有任何问题。

当卫星高度放在多旋翼无人机上,就完全不可接受,多旋翼无人机一般飞行于低空,对高度数据的精度、刷新率要求,都远高于固定翼,直接采用卫星高度控制高度,你的多旋翼无人机可能会变电梯。
而近些年的室内低空飞行需求,更是催生了超声波定高在消费级无人机的应用。
精灵3超声波定高和单目视觉识别模块

精灵4升级到双目视觉识别

然而消费级无人机的超声波器件作用距离有限,只能在低空有效工作。于是各厂家采用的高度逻辑是,只在低于特定气压高度时,才切换并启用超声波反馈提供的高度。因此,搭载有超声波定高功能的悟、精灵3、4,作用范围都在10米以内。
而液体密度还对超声波精度有较大影响,尤其水面对超声波的吸收让正常反馈大量衰减,飞机误以为正在上升,从而降低油门输出~然后就飞机就。。。 

这也是站长奉劝新手不要在水面飞行的原因。
4、无人机爬升预定高度返航,也是有条件
那既然低空气压计不靠谱,水面超声波不靠谱,那我飞高一点,返航高度设置到500米!总不能再出事儿了吧。  如果把高度想那么简单,那站长也只能呵呵呵了。
如果把高度想那么简单,那站长也只能呵呵呵了。
因为以下两个变量出现了,电压和失控。
当无人机低于最低电压告警值,一样会强行降落你的无人机,管你设置返航高度是200米还是500米,我快没电上升不了。
如果无人机在目视距离内,把油门推满,也可强制无人机不顾电压,缓慢上升。
另一小坑是,当发生图传丢失(也是失控的一种状态),APP提示触发返航,无人机正要爬升到你指定的返航高度,这时候你操作油门,会直接打断无人机上升指定高度,而直接返航。
最后嘛~~~ 
5、我不能达到的高度,你不能让我硬上
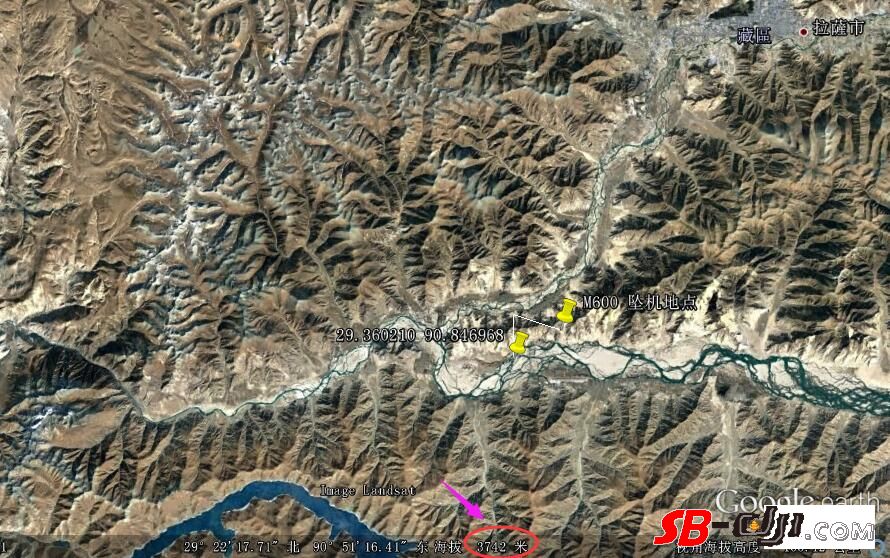
也许你的无人机已安全飞行过百起落,当旅行带去拉萨,飞机2分钟后就坠毁。

就在你百思不得其解电话咨询的时候, 厂家告诉你,超海拔了。
无人机在稀薄空气下,即使转速全开,螺旋桨出力也不足以稳定高度。
6、各国对消费级无人机飞行高度有不同的限制
除开各国对消费级无人机的起码限制,禁止飞离森林火灾事发点、机场或者其他建筑物9公里以内,禁止在军事基地、监狱、人群和机场等区域飞行,不要侵犯别人的隐私。而对无人机飞行高度的限制,却各有不同。
美国:FAA规定无人机最大离地高度为400英尺(120米),需保持在目视距离内;
英国:与美国相同,限制为最大离地高度为400英尺(120米);
法国:因为恐怖袭击全境禁飞,带入境都有被收缴的风险;
加拿大:无人机飞行高度不得超过90米;
中国:限飞120米,必须在目视距离内;
日本:航空法规定目视飞行,高度超过150米需要批准,夜间不允许飞行;
新加坡:限飞60米(网友提供);
埃及:限飞120米;
德国:限飞90米;
-
7、安全高度实践总结
1、无人机提供的高度,仅代表基于初始零高度的增减高度,并非无人机对地的绝对高度。
2、谨慎超低空飞行,尤其是贴水面飞行。
3、设定返航高度设置要大于飞行半径内最高建筑物,并富裕一定量。
4、要为返航预留足够电量。电量低于10%无人机会强制下降高度。
5、丢失图传并触发失控返航后,不要乱打杆把高度爬升中断。
6、超出或逼近无人机安全海拔的场地,还是想清楚再决定要不要起飞。
7、无人机飞行高度和场地不要违反本地法律。
最后愿天下机友不撞、不炸、不丢,站长就在这里,静静的看你们装逼…. 


