 赞
赞 南丹麦大学机电工程系的研究人员刚刚发表了一项研究,证明完全自主的自充电无人机系统能够在电力线附近长时间持续运行。该无人机配备了强大的机载感知和导航系统,使其能够定位电力线并接近它们进行着陆。着陆期间,被动驱动的夹紧机构抓住电力线电缆,之后控制电路调节开合铁芯电流互感器内的磁场,以提供足够的保持力以及电池充电。
该系统在活跃的室外三相电力线环境中进行评估。他们展示了连续多个小时的完全自主不间断的无人机操作,包括飞行、着陆、充电和起飞的多个循环,验证了延长的和基本上无限的续航能力。
组合式夹具和充电器设计升级了之前的技术。提出了一种任务自主系统,集成了以前的无人机电力线操作模块。这是通过多个连续飞行和充电循环得到验证的。
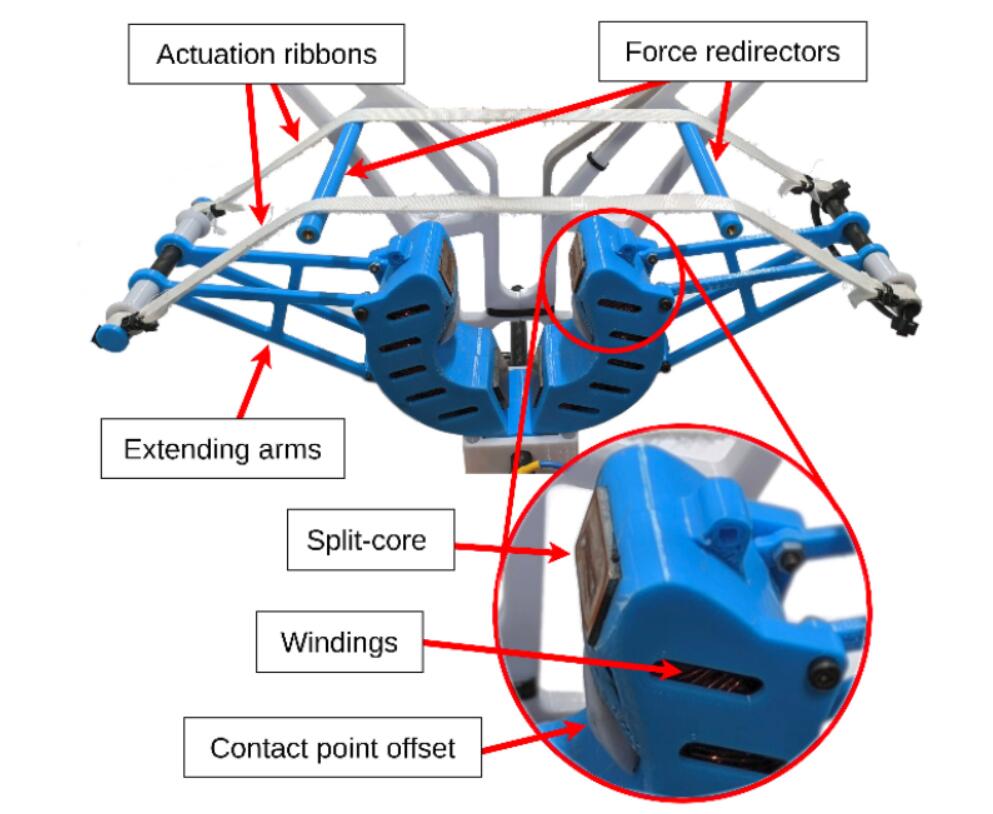
无人机系统配备了机载感知和自主组件,可检测架空电力线并将无人机导航至其附近。无人机顶部的抓手使其能够抓住电源线并为电池充电。

充电时,无人机的夹具和能量采集器会发出特有的声音。这项历时两个半小时的测试表明,该系统在飞行和充电模式之间不断循环。
无人机在测试期间保持完全自主行动,并展示了从中止着陆中恢复的能力。电源线中的电流约为 300 安培,能量收集设备能够为无人机电池充电 50 瓦。未来的工作包括提高系统的稳健性,并在更偏远的地点进行测试,通过添加检查功能来扩大任务的复杂性,以及调查系统对恶劣天气条件的适应性。
来源:南丹麦大学