 赞
赞 本报告显示了一项测试调查的结果,该测试调查了在使用四种不同的无人机磁力计针对 UXO(未爆炸弹药)替代目标收集参考数据。

该测试于2023年9月21日在拉脱维亚Baloži的SPH Engineering无人机测试场(北纬56.8631°,东经24.1119°)进行。场上放置了三个类似 UXO 的物体,符合 ISO SEEDS 标准,其磁性特性类似于 20、60 和 105 毫米炮弹。在测试过程中,无人机上安装的磁力计在不同高度的测试目标上空飞行。数据处理后在软件中完成目标检测。本次测试使用的设备为SPH Engineering的MagNIMBUS、SENSYS的MagDrone R3、Geometrics的MagArrow II和GEM Systems的DRONEmag GSMP-35U。
数据由 Sergejs Kucenko 收集1。马蒂斯·布兰茨 (Matiss Brants) 的数据处理和报告1.
1 SPH Engineering SIA,拉脱维亚
免责声明
这里的术语“检测到”意味着数据解释器已经识别出足够强的信号,需要进一步检查或采取行动。解释是主观的,会根据口译员的经验和知识而变化。
SPH Engineering SIA、SENSYS Sensorik & Systemtechnologie GmbH、Geometrics Inc. 或 GEM Systems Inc. 均未做出任何声明或保证,保证在 SPH Engineering 测试范围以外的任何条件下使用相同或不同的硬件、软件和工作流程。
本报告“按原样”提供,旨在展示本文所述系统的功能,并为规划未爆炸弹药调查提供一些指导。
数据样本访问>>> https://files.ugcs.com/s/WL7sXB7zpT4xeFj
方法
测试设置
此次测试在拉脱维亚巴洛日的“SPH Engineering SIA”无人机测试场地进行,这是一个占地 4 公顷的大型开放场地,周围环绕着森林,处于磁力相对安静的区域。UXO 测试装置包括三个不同的标准化 ISO SEEDS 物体,这些物体沿 8 米长的轮廓放置,其最长轴位于西南-东北方向。ISO SEEDS 物体类似于 60 毫米、20 毫米和 105 毫米炮弹(图 1)。为简单起见,在下文中,这些物体将被称为“军械”、“炮弹”或“UXO”。测试区域可以定义为非磁性,主要由改造泥炭组成,尽管附近发现了一些小型人为磁性物体,并且在可视化结果中可见。
图 1. 测试中使用的 UXO ISO SEEDS 对象。20毫米炮弹放置在距离60毫米炮弹右侧3.4米处,而105毫米炮弹则位于距离约8.1米的位置。

测试期间,每个磁力计装置均以平行线方式飞越未爆炸弹药物体及其周围区域。每次成功通过后,海拔高度从0.5米开始升高到2.5米,每次增量为0.5米,对测试区域进行5次测量。必须强调的是,本次测试中的不同飞行高度模拟的是磁力计到未爆炸弹药的距离,而不是磁力计距地面的高度。例如,2.5米飞行测试结果预测了传感器在距地面0.5米的高度飞行以及埋在地下2.0米深度的未爆炸弹药的探测能力。
飞行线末端规划有 10 米的跑道,以满足稳定和受控飞行的不同设置要求。所有飞行均由经验丰富的无人机飞行员使用 SPH Engineering UgCS(通用地面控制系统)软件和 SkyHub 机载计算机按照预先计划的路线进行。SPH Engineering 开发的真实地形跟随系统用于精确的高度测定。
磁力计
所有磁力计均连接至 DJI Matrice 300 RTK 无人机,该无人机利用 GNSS(全球导航卫星系统)和 RTK(实时运动学)进行精确定位。对于地理标记,针对不同的磁力计使用了不同的方法:
MagNIMBUS:数据记录是在 SkyHub 机载计算机上使用从无人机的 GNSS 接收器传输的坐标进行的,在测试期间该接收器处于 RTK 模式。
MagDrone R3:该磁力计有一个内部数据记录器,但坐标流是通过 SkyHub 机载计算机从无人机的 GNSS 接收器提供的。
MagArrow Mk2 具有内部数据记录器和内部 RTK GNSS 接收器,但在测试期间处于非 RTK 模式。将数据中的飞行坐标替换为 SkyHub 记录的飞行日志中的精确坐标后(无人机处于 RTK 模式)。
DRONEmag GSMP-35U 有一个内部数据记录器,并且一个单独的 GNSS 接收器直接连接到记录器。该 GNSS 接收器处于非 RTK 模式,记录数据中的坐标是使用 SkyHub 记录的飞行轨迹进行细化的。
为了确保精确的离地高度,使用了 SPH Engineering 的真实地形跟随系统 (TTF)(其重要性将在讨论部分进行更多讨论)。
磁力云
SPH Engineering 制造的 MagNIMBUS 系统(图 2)采用 QuSpin 全场磁力计,放置在无人机下方可折叠“臂”的末端,可保护系统在与意外障碍物发生碰撞时免受损坏,并允许极低的飞行具有相对安全性。QuSpin 传感器以 500 Hz 的速率记录总磁场强度,这使其能够滤除从无人机电气部件和附近的交变电磁源(如电源线)拾取的任何磁噪声。该装置以 1 m/s 的恒定速度飞行。
图 2. SPH Engineering 的 MagNIMBUS 磁力计。

磁无人机R3
SENSYS GmbH 的MagDrone R3 是一款磁力计系统(图 3),在一米长管的末端内置有两个 3 轴磁通门矢量传感器。与单传感器设置相比,这种双传感器设置可将飞行时间缩短至少 50%。该设备直接连接到无人机的腿部,从而提供稳定且相对可预测的传感器运动,同时也使磁力计更靠近无人机电机的磁干扰。两个传感器均以 250 Hz 的采样率记录所有三个轴上的磁场,以消除无人机电机和电源线等其他来源的交变噪声。该装置以 2 m/s 的恒定速度飞行。
图 3.SENSYS MagDrone R3 磁力计设置。

磁箭II
Geometrics MagArrow II 磁力计(图 4)在空气动力学外壳中采用线悬式装置,将总场磁力计传感器放置在尽可能远离无人机干扰的位置。即使采用这样的放置方式,1000 Hz 的极高采样率也可以滤除由无人机引起的任何剩余交变磁噪声。悬挂装置增加了磁力计外壳的移动,导致磁场读数发生变化。因此,强烈建议进行航向校准飞行。在本次测试中,MagArrow II磁力计悬挂在3米长的电缆系统中,并以2 m/s的恒定无人机速度完成飞行。
图 4.Geometrics MagArrow II 磁力计设置。

DRONEmag GSMP-35U
GEM Systems DRONEmag GSMP-35U 是一个全场磁力计系统(图 5),悬挂在无人机上的 3-5 m 电缆中。此设置可提供远离无人机电机磁干扰的最大距离。与其他制造商的传感器相比,这种设置可实现低得多的采样率(最大 20 Hz)。低采样率还提供更容易和更快的数据处理。该装置悬挂在 5 米长的电缆中,并以 1 m/s 的恒定无人机速度飞行。
图 5.GEM Systems DRONEmag GSMP-35U 磁力计设置。

数据处理
所有系统的磁性数据处理都尽可能相似,但 MagDRONE R3 和 MagArrow II 系统的特定数据格式转换除外,这需要专有软件。图 6 概述了一般工作流程,附录中详细介绍了所有设置。使用的主要软件是Geosoft Oasis Montaj Standard Edition v.2023.1。仅利用基本模块功能和记录良好的处理方法。使用封闭和开源软件可以重复所有步骤并获得类似的结果。
图 6. 数据处理步骤的工作流程。

数据可视化
数据可视化是比较不同设备结果的非常重要的一步,因为它可以很容易地被操纵以产生对特定设备的偏见。因此,详细解释可视化技术背后的推理被认为是必要的。与数据处理一样,所有传感器数据都采用通用方法。
处理后的数据被可视化为残余异常磁场网格及其分析信号(AS)。选择 0.2 米的像元大小是为了考虑非常密集的在线采样点和相对稀疏的 0.5 米的飞行线间隔。这有助于在平行于飞行路径的方向上保持高分辨率,同时提供垂直于线条的更平滑的网格。所有网格都应用了模拟浮雕的阴影,以增强较小异常的可视化效果。
为每个飞行通道和传感器创建两个网格:
1) 具有直方图均衡色标的残余异常场
和
2) 具有正态分布色标的分析信号。
尽管具有直方图均衡色标的 AS 网格可以更好地表示小异常,但它也会增强噪声(图 7)。
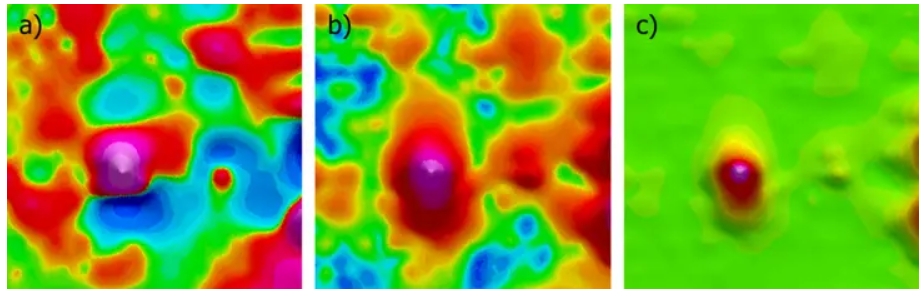
图 7. 不同可视化中的两个明显异常。a)具有直方图均衡色标的残余异常场揭示了两个磁偶极子。b) 具有直方图均衡色阶的分析信号清楚地显示异常和大量噪声。c) 具有正态分布色标的分析信号大大降低了噪声并显示了异常区域的峰值,尽管正确的异常区域并不明显。
确保公平的表示在最低飞行高度尤其重要,因为即使目标物体上方轨迹的微小变化也会导致磁场幅度的显着变化。对色标应用相同的值会导致某些传感器出现偏差。因此,每个磁力计的网格色标值是使用 Oasis Montaj 中的颜色工具根据其自身的数据幅度自动缩放的。
结果
0.5m高度飞行
在距离目标0.5米的高度,所有传感器都不同程度地检测到了最小的(20毫米炮弹)物体。尽管如此,信号强度很大程度上取决于传感器的轨迹。残余异常网格中的偶极子(图 8)在 MagNIMBUS 和 GSMP-35U 数据中非常明显,而对于 R3,信号较弱,但仍然明确。就 MagArrow II 而言,偶极子几乎无法被察觉,因为传感器大部分经过物体的南侧,尽管信号至少会被认为是可疑的。在所有情况下,105 毫米外壳的偶极子信号失真都是由于非常高的磁梯度造成的。
AS 网格(图 9)精确定位异常的中心。MagNIMBUS 清楚地显示了所有异常现象,其中 60 毫米和 20 毫米外壳异常现象的尺寸出乎意料地相似。然而,R3 磁力计显示出较小异常之间的明显差异。MagArrow II 和 GSMP-35U 对于较小异常的信号都会减弱,但这主要是由于 105 毫米壳异常的振幅非常高 – 它扭曲了色标。这就是为什么应始终检查 AS 和残余异常场网格的原因。R3 数据中的背景噪声更加明显,但仍然很明显。GEM System 的 GSMP-35U 显示“最干净”的背景,很可能是由于距无人机 5m 的距离。
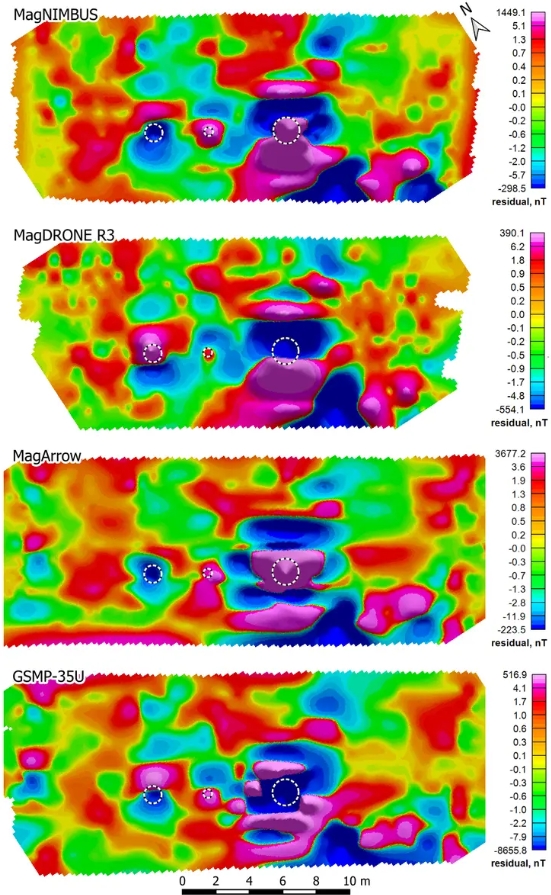
图 8. 目标上方 0.5 米高度处的残余异常场网格。白色虚线圆圈精确定位了未爆炸弹药目标的位置:左侧 – 60 毫米炮弹,中间 – 20 毫米炮弹,右侧 – 105 毫米炮弹。
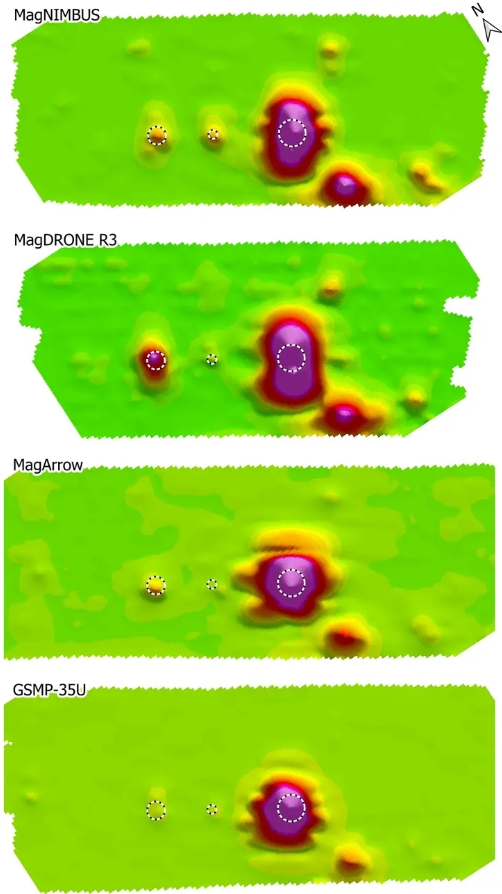
图 9. 分析信号网格位于目标上方 0.5 米的高度。有关图例,请参见图 8。
1.0m高度飞行
在 1.0 m 飞行高度的残余异常网格中,105 mm 和 60 mm 壳偶极子清晰可见(图 10)。由于磁梯度较低,105 毫米外壳的磁偶极子现在在所有情况下看起来都更加“正确”。似乎没有传感器再检测到 20 毫米炮弹。尽管 MagNIMBUS、MagArrow II 和 GSMP-35U 在炮弹位置附近显示出一个小异常,但它可能与噪音太相似而不能被视为潜在目标。
AS 网格也没有显示 20 毫米炮弹信号的迹象(图 11),但所有传感器均检测到 60 毫米和 105 毫米炮弹。尽管 MagNIMBUS 和 MagArrow II 显示出不太明显的 60 毫米炮弹信号,但这似乎是由于飞行轨迹几乎错过了目标。即便如此,残留异常网格中的信号还是清晰的。这次,MagNIMBUS 传感器的噪声似乎是最低的,但由于信噪比下降,所有传感器开始显示更多随机信号。
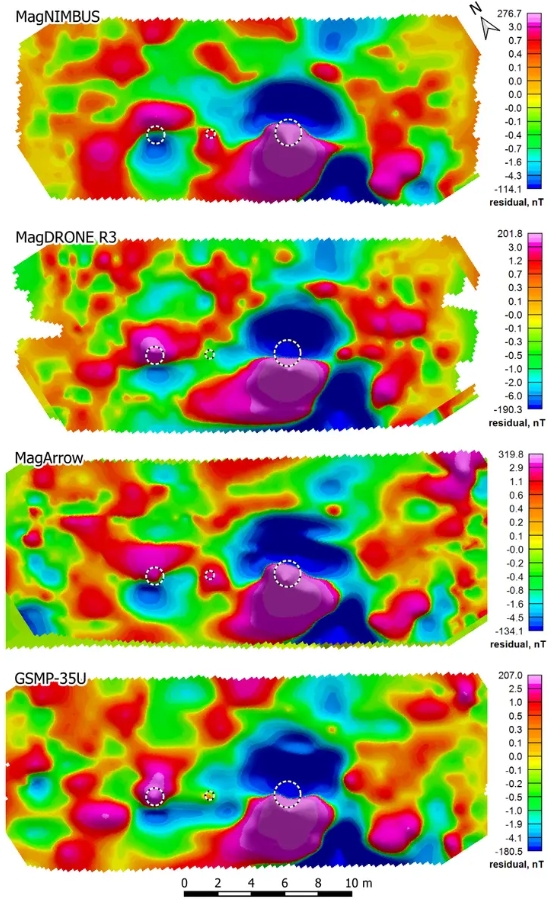
图 10 目标上方 1.0 米高度处的残余异常场网格。有关图例,请参见图 8。
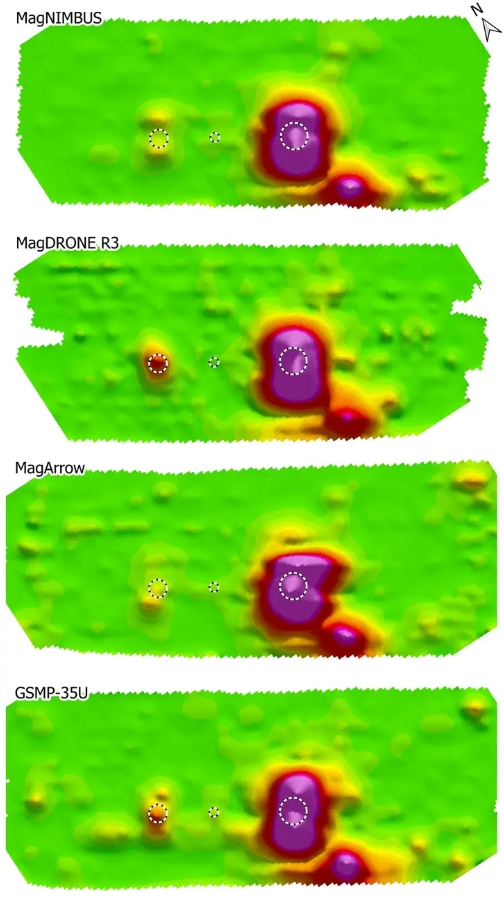
图 11. 目标上方 1.0 米高度处的分析信号网格。有关图例,请参见图 8。
1.5m高度飞行
在 1.5 m 的高度,传感器开始丢失 60 mm 炮弹的信号(图 12)。同时,对于MagNIMBUS和R3来说,仍然是清晰的偶极子信号。GSMP-35U 经历了更多的噪音,但 MagArrow II 尽管进行了航向校正,但仍存在未解决的航向错误。任何传感器都没有 20 毫米炮弹信号的迹象。
AS 网格强化了这些观察结果(图 13)。R3 在 60 毫米炮弹位置上显示出明显的峰值,而对于 MagNIMBUS,它更像是一个分散但仍然值得注意的信号,但在 GSMP-35U 的情况下,信号似乎有些失真。不过,在现实场景中,肯定还是会引起人们的关注。这些强烈的信号峰值似乎也围绕着 105 毫米炮弹的异常现象,但其原因尚不清楚。MagArrow II 的航向错误导致了大部分区域的长条纹,并在最左侧异常附近出现了更强的峰值,但这可能不会被视为潜在目标。
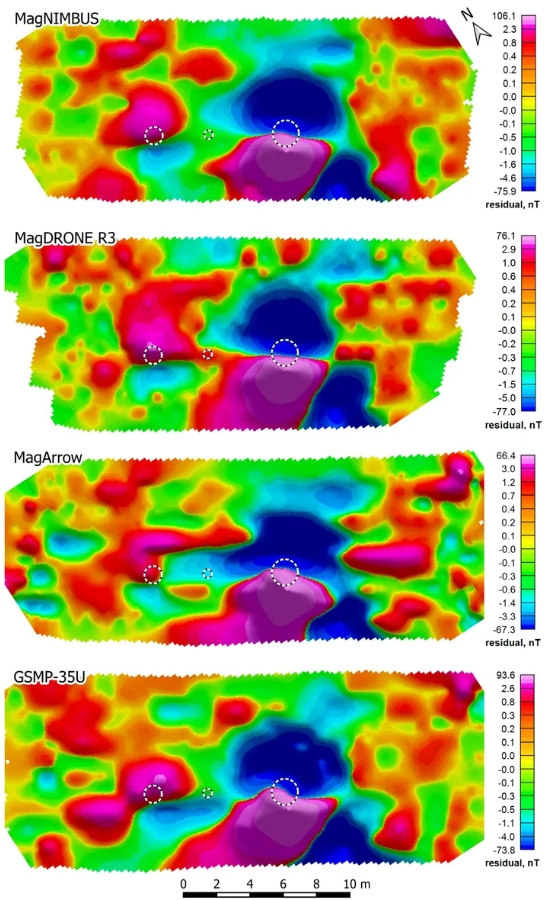
图 12. 目标上方 1.5 米高度处的残余异常场网格。有关图例,请参见图 8。
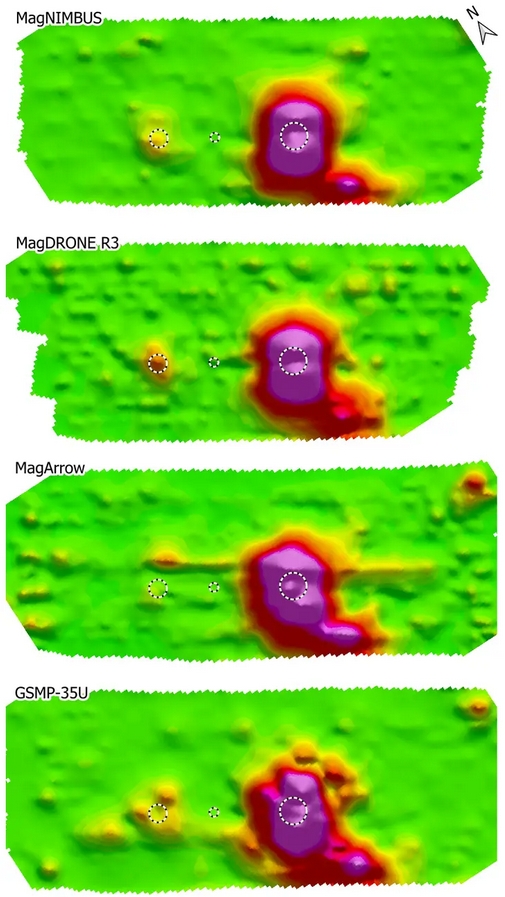
图 13. 分析信号网格位于目标上方 1.5 米的高度。有关图例,请参见图 8。
2.0m高度飞行
在 2.0 m 的距离处(图 14),60 mm 外壳的异常失去了负极,转变成简单的正磁异常。在所有传感器中,R3 显示出最明显的信号,而对于其余传感器,信号似乎非常接近噪声水平,不应被视为“检测到”。AS 网格(图 15)总体上显示出相同的趋势。
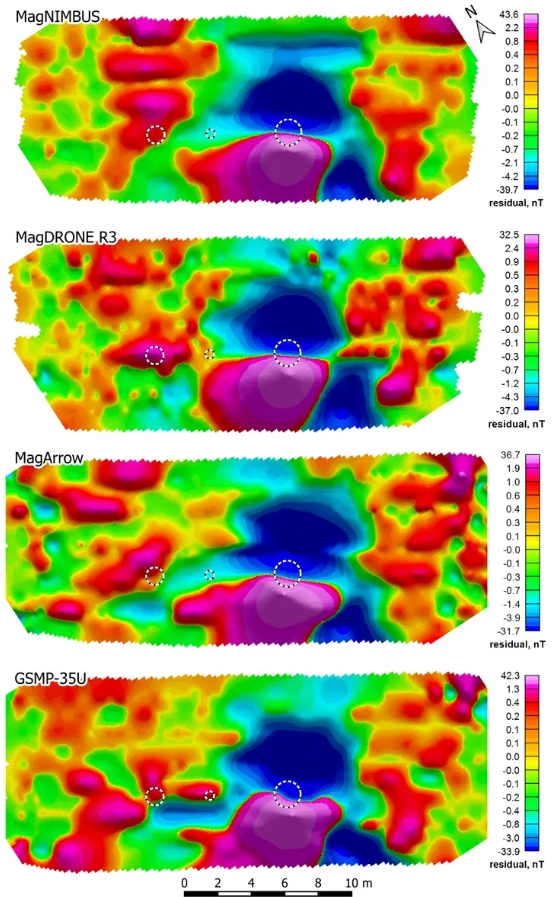
图 14 目标上方 2.0 米高度处的残余异常场网格。有关图例,请参见图 8。
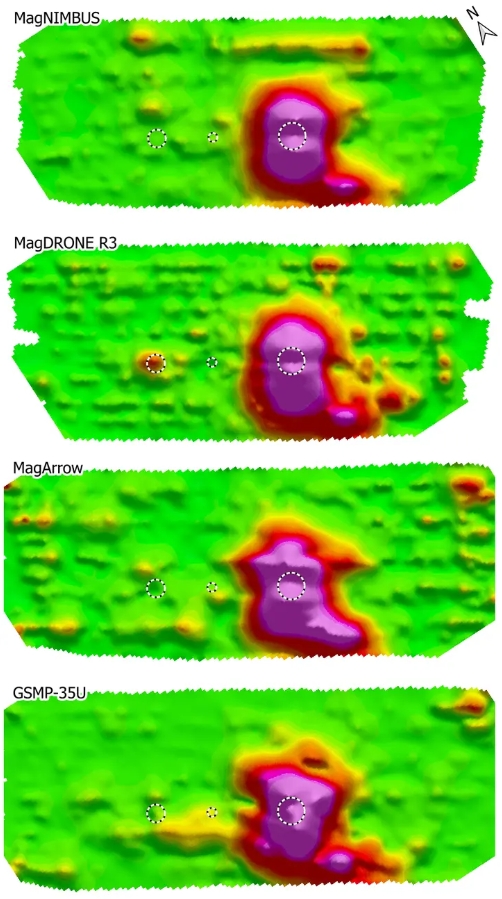
图 15. 目标上方 2.0 米高度处的分析信号网格。有关图例,请参见图 8。
2.5m高度飞行
在最高高度2.5米时,所有传感器的残余异常网格(图16)仍然清晰地显示出105毫米炮弹异常。毫不奇怪,在这个距离上,信噪比是最低的,并且对于所有传感器来说,除非使用更先进的过滤技术,否则至少会出现一些误报。60毫米炮弹的信号在任何残余异常网格中都不够清晰,特别是由于明显的噪声条纹。尽管如此,在 AS 网格中(图 17),R3 传感器的军械正上方似乎有一个有点分散的峰值,可以算作“检测到”。对于 MagNIMBUS 和 GSMP-35U,也存在明显的信号,尽管这可能会被视为条纹状噪声而被忽略。
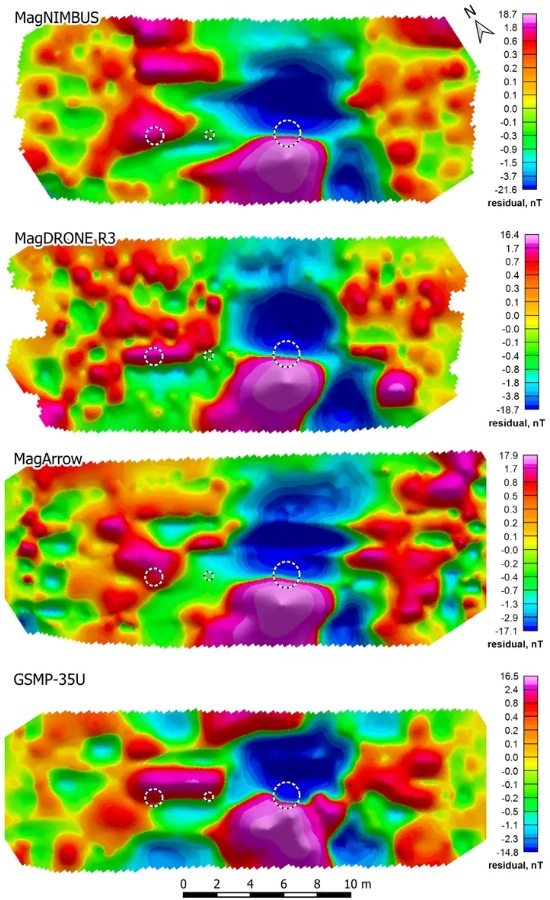
图 16. 目标上方 2.5 米高度处的残余异常场网格。有关图例,请参见图 8。
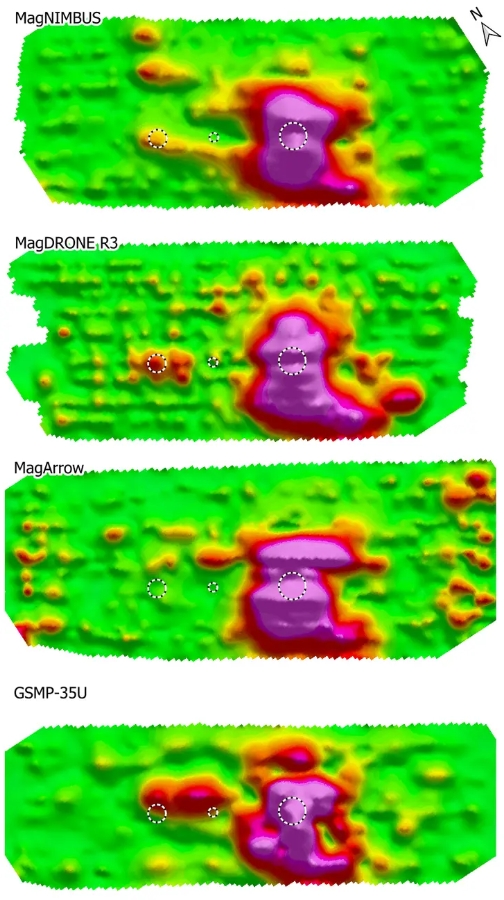
图 17. 位于目标上方 2.5 米高度处的分析信号网格。有关图例,请参见图 8。
完整对比
上述所有结果均汇总于表 1 中以供概览。对于信号充足的情况,会给予检测确认。在所有其他情况下,可能会怀疑信号是噪声或不存在信号。在现实生活中,专家需要将所有信号纳入其中,但这样做会导致误报大大增加,或者只选择可靠的信号,而冒着丢失目标的风险。
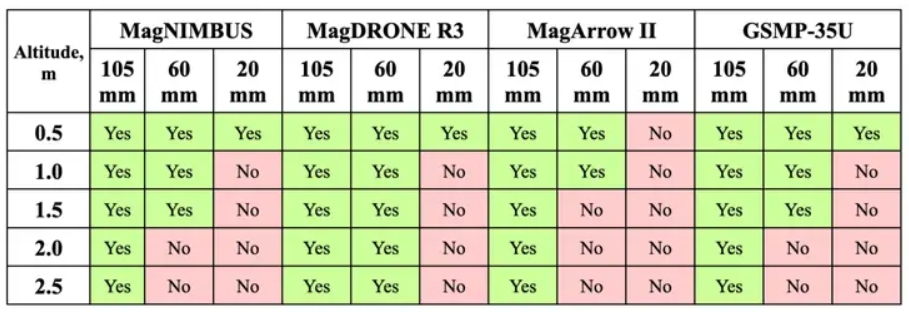
表1.所有测试传感器的检测能力比较。“是”表示可靠地检测到,“否”表示未检测到或不确定检测。
飞行高度变化
根据磁信号搜索未爆炸弹药,尤其是小型未爆炸弹药,需要精确的高度保持,因为磁场(以及检测距离)随着距离的三次方而减小。如果传感器不能保持精确的离地面高度,则勉强达到检测极限的较小未爆炸弹药很容易被检测不到。例如,假设本底噪声为 10 nT,则磁力计在 54 厘米距离处仍可检测到的 40 毫米外壳,如果飞行高度仅提高 15 厘米,则可能无法检测到(参考: Billings et al. 2006) , 未爆炸弹药的磁模型)。
飞行高度变化如图 18 所示,以解决不同磁力计设置的高度保持精度的潜在问题,特别是 MagArrow II 和 GSMP-35U,它们悬挂在无人机下方 3 米和 5 米的电缆中。为了确保磁力计不会干扰 TTF 传感器,它被放置在无人机侧面的特殊延伸部分上(参见方法部分中的图 4 和图 5)。
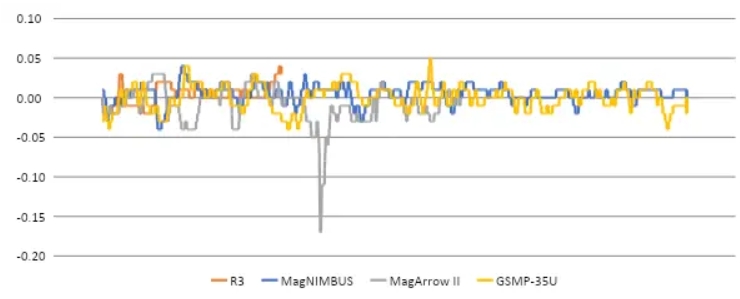
图 18. 地面以上海拔高度随样本数量的变化(以厘米为单位)。这些变化是按 20 厘米的间隔计算的,因为在较短距离内海拔变化引起的任何异常都会在数据处理过程中被过滤掉。传感器的样本计数因飞行时间而异(参见下一节)。
飞行时间
飞行时间根据制造商在测试条件下建议的所选速度而有所不同,但对于 MagDRONE R3 来说,这也是由于双传感器设置所致。这使得快速现场测量成为可能,仅需 1.5 分钟即可完成单次高度飞行。MagArrow II 的飞行速度与 R3 相同,但只有一个传感器,因此飞行时间为 3 分钟。MagNIMBUS和GSMP-35U仅用了5分钟多一点就完成了单高度飞行。
结论
SENSYS MagDRONE R3 显示了所有测试传感器中的最佳结果,在所有高度检测 105 毫米外壳,在大多数高度检测 60 毫米外壳。SPH Engineering MagNIMBUS 和 GEM Systems DRONEmag GSMP-35U 无法分别在 2.0 米和 2.5 米处可靠地检测到 60 毫米炮弹。Geometrics MagArrow II 在 1.5 m 高度没有显示出 60 毫米炮弹的清晰信号,也从未检测到 20 毫米炮弹。
该测试证明,在特定的测量条件下,使用 MagArrow II 或 GSMP-35U 等“悬挂”系统相对于 MagNIMBUS 或 R3 等“固定”系统没有任何优势。尽管很明显,但无人机电机的磁噪声问题比装置的摇摆和由此产生的航向误差要小。
未爆弹药磁力勘测需要可靠的现场覆盖、固定的间隔距离和精确的高度保持,以增加检测小异常现象并减少误报的机会。
附录——数据处理步骤
磁力云
使用蒙泰绿洲:
1. 应用滞后校正(基准点):
0.5m:-50
1.0m:-140
1.5m:-130
2.0m:-140
2.5m:-140
2. 应用 100 个基准点的低通滤波器(对应于约 0.2 m 的点间隔)。
3. 应用 10000 个基准点的滚动中值滤波器(对应于约 20 m 的距离)。
4. 生成单元大小为 0.2 m、色标直方图均衡的残余异常网格。
5.基于残余异常网格计算分析信号。
6. 对 AS 网格应用 3×3 卷积 1 遍平滑,并将色标更改为正态分布。
磁无人机R3
使用 SENSYS MagDrone 数据工具:
1.1. 导入的文件 20230920_142316_MD-R3_#0207.mdd
1.2。分段轨道:20deg,1.5m。
1.3. 没有过滤器或下采样。
1.4. 已加载 GNSS RTK 数据。
1.5. 导出到 .asc 文件。
使用蒙泰绿洲:
2.1. 根据航班高度将航班划分到单独的数据库中。
2.2. 按传感器编号将每个航班分开。
2.3. 修正的时间延迟:+150 基准点。
2.4. 应用 25 个基准点的低通滤波器(对应于 ~0.2 m 点间隔)。
2.5. 应用 2500 个基准点的滚动中值滤波器(对应于约 20 m 的距离)。
2.6。生成像元大小为 0.2 m 的残余异常网格并计算分析信号。
2.7. 对 AS 网格应用 3×3 卷积 1 遍平滑,并将色标更改为正态分布。
磁箭II
使用几何测量管理器:
1. 数据从 MagArrow .magdata 转换为 .csv 数据格式。
使用蒙泰绿洲:
1. 将精确的GPS RTK坐标导入磁数据数据库。
2. 根据飞行高度将数据分割成行。
3. 利用校准飞行中获取的数据进行航向修正。
4. 对 +750 个基准点应用滞后校正。
5. 应用 100 个基准点的低通滤波器(对应于约 0.2 m 的点间隔)。
6. 应用 10000 个基准点的滚动中值滤波器(对应于 ~20 m 窗口)。
7. 生成单元大小为 0.2 m、色标直方图均衡的残余异常网格。
8. 计算的分析信号。
9. 对 AS 网格应用 3×3 卷积 1 遍平滑,并将色标更改为正态分布。
GSMP-35U
使用蒙泰绿洲:
将精确的GPS RTK坐标导入磁数据数据库。
应用滞后校正(基准点):
0.5m:+15
1.0m:+15
1.5m:+7
2.0m:+7
2.5m:+7
应用 4 个基准点的低通滤波器(对应于 0.2 m 间隔)
应用 400 个基准点的滚动中值滤波器(对应于 20 m 窗口)。
生成单元大小为 0.2 m、色标直方图均衡的残余异常网格。
基于残余异常网格计算的分析信号。
对 AS 网格应用 3×3 卷积 1 遍平滑,并将色标更改为正态分布。